前回はARM系CPUのSBC(シングルボードコンピュータ)「ROCK64」にLinuxベースのOSをインストールしてエミュレータをセットアップ。

残念ながらX68000のエミュレータを快適に動かすことはできませんでしたが8ビットCPUのレトロパソコンならばなんとか動かせるのではないかという結果でした。
そこで、今回はもう少し高性能なSBCを使って同じようにLinuxベースのOSで実験を。
NVIDIA Jetson nanoとは?
Jetson nano はラズベリーパイなどと同じSBC(シングルボードコンピュータ)。
MicroSDなどのストレージにLinux系OSをインストールして利用できるボードコンピュータです。
NVIDIA社が提供しているだけあり、GPUを搭載して計算能力の高さでラズパイとの差別化を図っています。
計算能力の高さを生かして人工知能(AI)分野の研究用途に利用されたりもします。
□仕様
CPU:Quad-core ARM A57 @ 1.43 GHz
GPU:128-core Maxwell
メモリ:2GB 64-bit LPDDR4 25.6 GB/s
ストレージ:microSD(64GB以上推奨)
Video Encoder:4K @ 30 | 4x 1080p @ 30 | 9x 720p @ 30 (H.264/H.265)
Video Decoder:4K @ 60 | 2x 4K @ 30 | 8x 1080p @ 30 | 18x 720p @ 30|(H.264/H.265)
カメラ:1×MIPI CSI-2 camera connector
ネットワーク:Gigabit Ethernet
表示出力:HDMI
USB:1x USB 3.0 Type A, 2x USB 2.0 Type A, 1x USB 2.0 Micro-B
機能:I2C, I2S, SPI, UART, SD/SDIO, GPIO
サイズ:100 mm x 80 mm x 29 mm
電源供給:USB-Type-Cより(5V/3A)

さすが「NVIDIA」、梱包箱もしっかりとしてる。

中身はボードと簡単な取扱説明書だけ、電源やケーブル類は別途用意する必要がある。
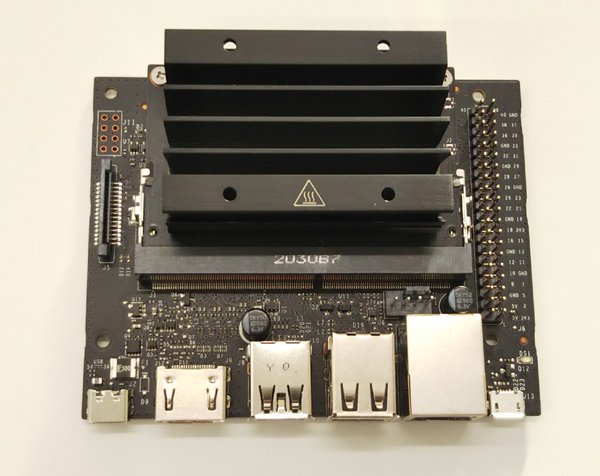
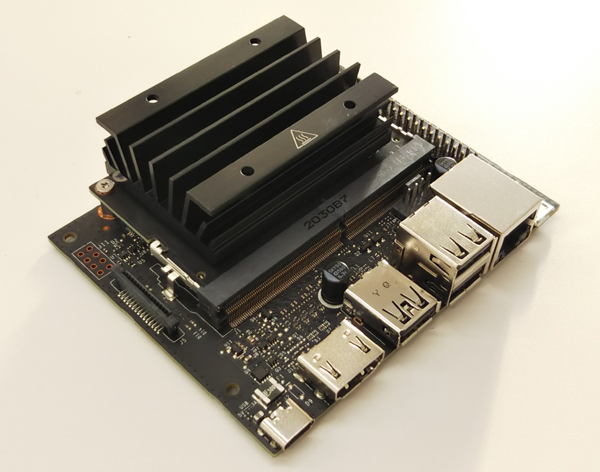
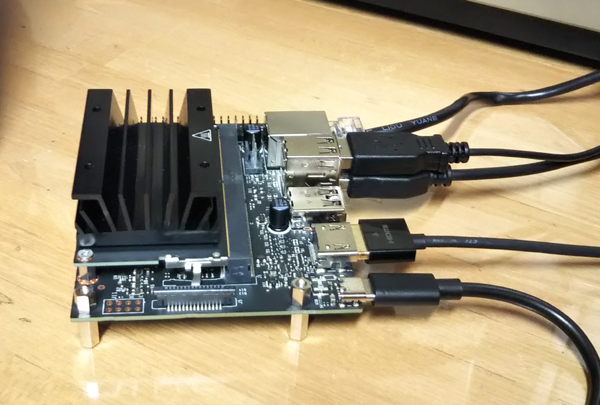
ボードの側面にコネクタ類が並び、プロセッサのある反対側には大きめのヒートシンクが。
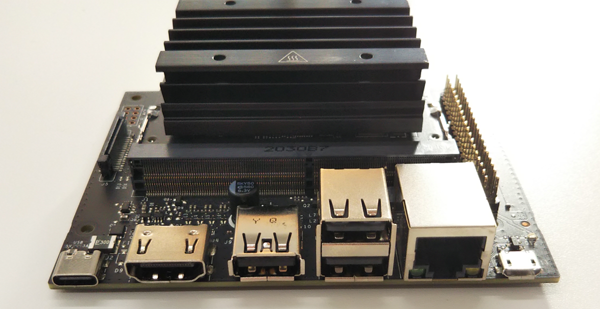
コネクタは左より電源供給用のUSB-Type-C、HDMI、USB、LAN、USB-Type-Bが並ぶ。
このボードにBluetoothやWiFiなどの無線機能は無い。
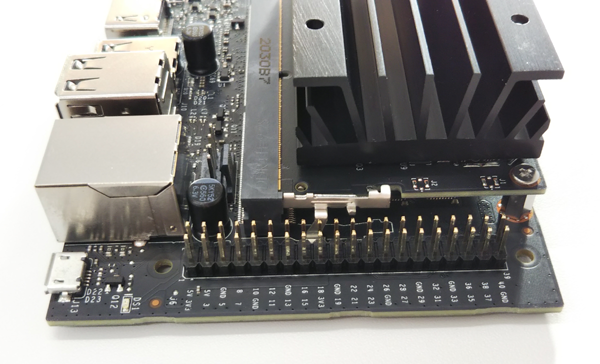
コネクタ側から見て右側面にはSBC特有のピンヘッダがある。
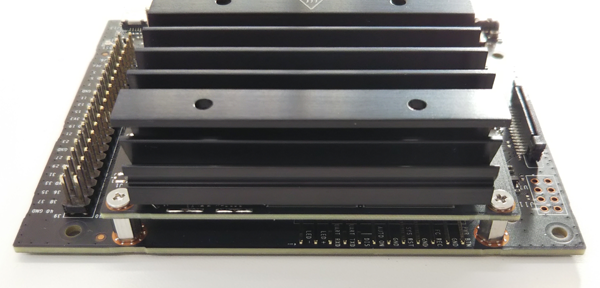
ヒートシンクは子亀のボードについておりこのボードの下側にストレージとなるMicroSDのスロットがある。
コネクタサイドから見て左側にはカメラモジュールを接続するコネクタなど。
まあ、マニアックなボードですよね。
OSのセットアップ
NVIDIAの公式サイトから「Linux(ubuntu)」のイメージをダウンロードしてセットアップ。
NVIDIA公式サイト:Jetson Download Center
「Jetson Nano 2GB Developer Kit」
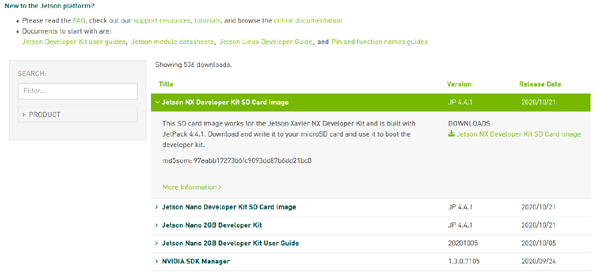
メモリサイズでイメージが分かれているので間違えない事。
「SDカードフォーマッター」でSDカードをフォーマット。

カードの選択、ドライブ名を絶対に間違えない事。
「balenaEtcher」でフォーマットしたSDカードにOSイメージを書き込み。
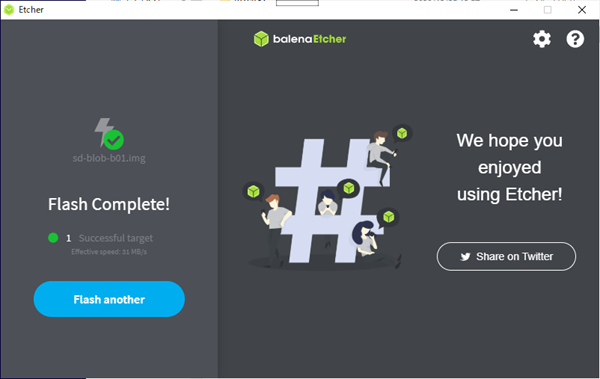
この辺の手順は他のSBCでも同じで過去ログの中で解説していますので詳しく知りたい方はそちらをご参照ください。
完了したらOSイメージを書き込んだSDカードを「Jetson nano」に挿し込んで電源を投入します。
HDMIケーブルでモニター接続、USBでマウスとキーボードを接続、LANケーブルでネットワーク接続。
電源はUSB-Type-Cより供給。
オープニングはNVIDIAのロゴマーク。

画面に表示される要求に応じていくつかの項目を設定していく。
まずはユーザーライセンス契約の受け入れ。
次に言語選択。ここでは日本語を選択。
続いてキーボードを選択。使っている日本語キーボードを選択。
タイムゾーンを選択。日本なのでTokyo。
アカウント情報を入力。Jetson68kにしてやった。
ここで入力された情報に従ってセットアップが開始されるのでしばらく待つ。
設定が終わって再起動するとこのような感じでデスクトップが立ち上がる。
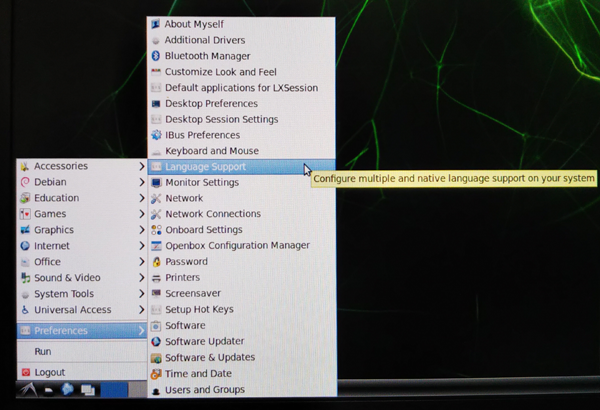
このままではメニューが英語でわかりづらいので日本語化する。
system setting より Language Support
インストール
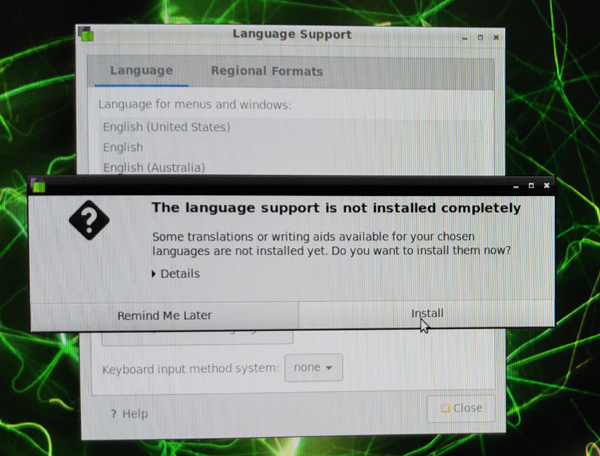
パスワードを求められるので入力
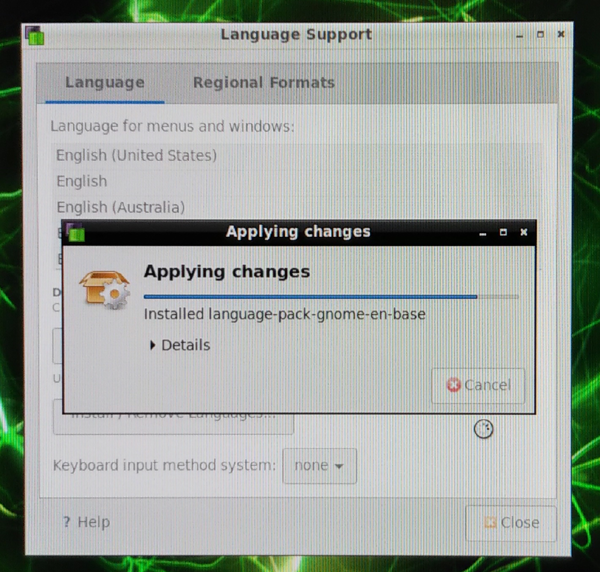
インストール開始
終了したら日本語をドラッグして上へ
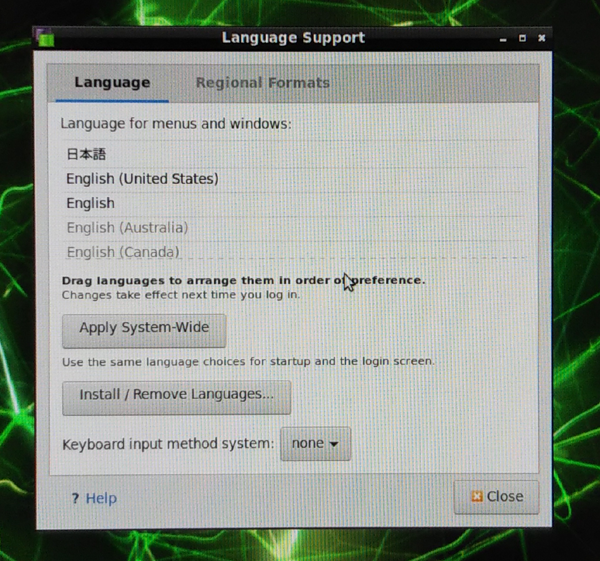
再起動するとデスクトップ環境が日本語になっている

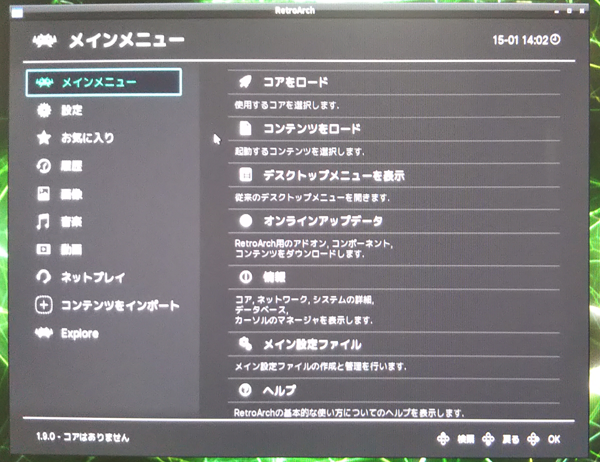
これで「ubuntu」デスクトップ環境の準備ができたので「RetroArch」をセットアップ
RetroArchのセットアップ
「ubuntu」に「RetroArch」をセットアップするには。
ターミナルを起動して。
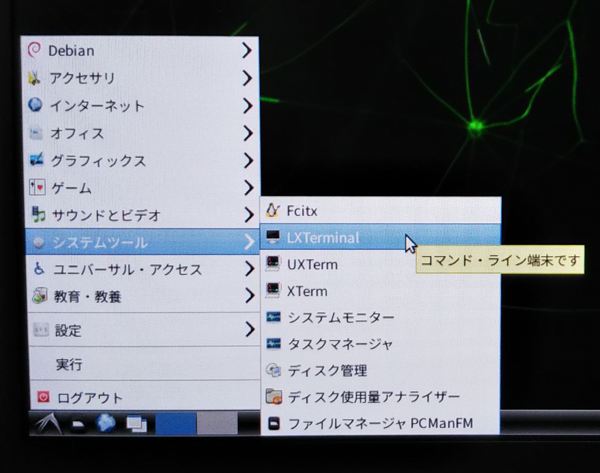
PPAを有効に
sudo add-apt-repository ppa:libretro/stable
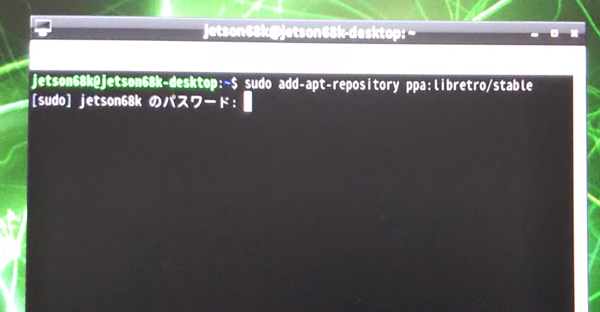
パスワードを求めてくるので入力する。
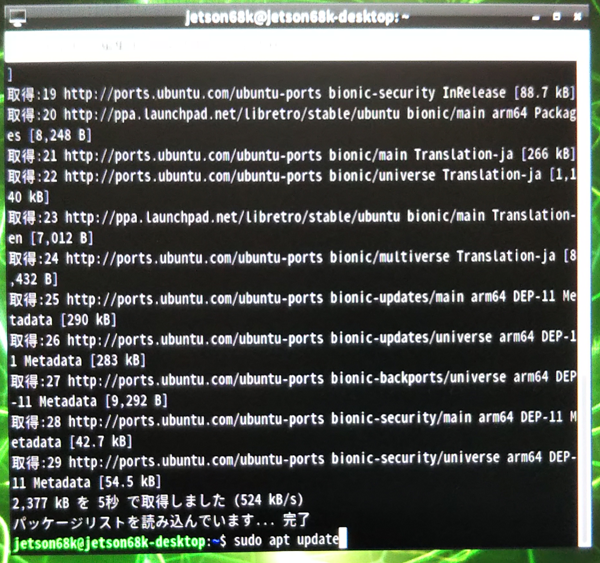
新しいRetoroarchソフトウェアPPAをセットアップ
sudo apt update
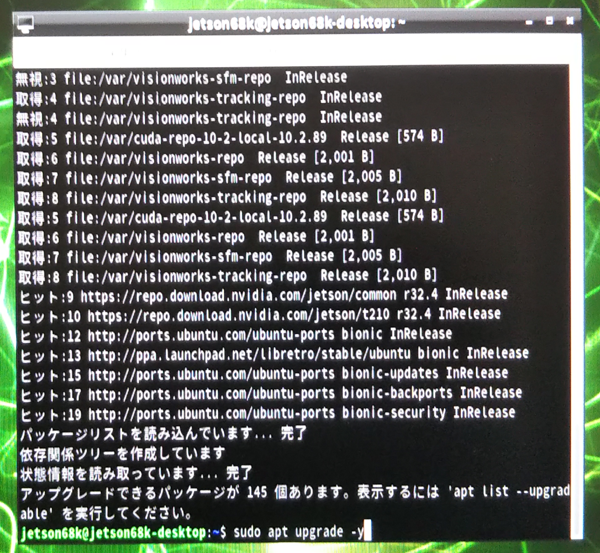
アップグレード保留中のソフトウェア更新プログラムをインストール
sudo apt upgrade -y
Retoroarchエミュレーションアプリケーションをセットアップ
sudo apt install retroarch -y
起動してみる。
無事起動。
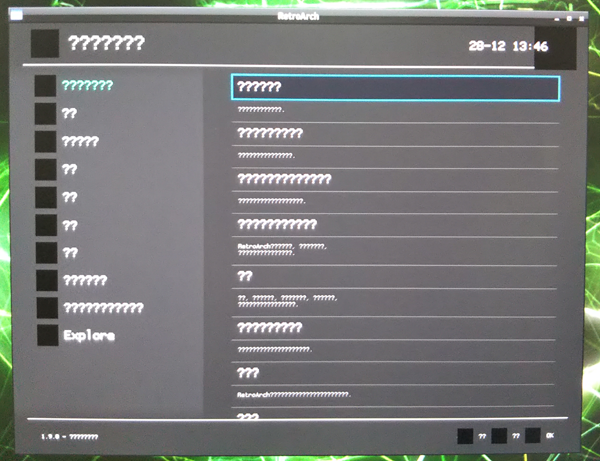
これはひどい、文字が一切出てこない。(笑)
日本語表記のところが文字化けしてるのかな?
他のハードウェアに導入したRetroArchを起動して場所を推測してアップデートを実施。
アセットが壊れているよとワーニングが出ているのでアセットを更新。
たぶんここがオンラインアップデート。
たぶんこの下の文字数が少ないのがアセット。

無事アップデートに成功して画面が綺麗になった。
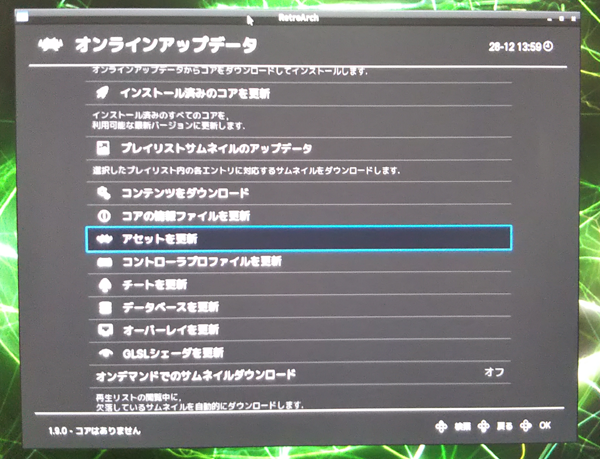
アプリケーションの見た目って大事。
日本語化もできている。
オンラインアップデートでコア情報ファイルを更新。
X68000用のコアをダウンロード。
できない。。。
ダウンロードリストが出てこない。
再起動するも変化なし。。。
なんだこの理不尽な現象は。
「RetroArch」自体はインストール成功して動作してるから設定をいじくれば動きそうだけども。
こんなところで留まっていても仕方ない。
手段は他にもあるということで「RETROPIE」に浮気することに。
RETROPIEのセットアップ
2回目ともなるとすいすいーとOSのセットアップが捗りますよ、まったく。
デスクトップの日本語化を終えて「RETROPIE」のセットアップをと思ったら。
ここでアップデートのお知らせがきたので「今すぐアップデート」する。
これで「ubuntu」が最新版となる。
今度こそ「RETROPIE」のセットアップを。
参照するのは以下のサイト。
参考URL:Retropie on Debian/Ubuntu/Mint
「RETROPIE」をダウンロード。
ターミナルから次のように進める。
sudo apt update && sudo apt upgrade
sudo apt install -y git dialog unzip xmlstarlet
git clone –depth=1 https://github.com/RetroPie/RetroPie-Setup.git
cd RetroPie-Setup
sudo ./retropie_setup.sh
ここでエラー。
$ sudo ~/RetroPie-Setup/retropie_setup.sh
Unknown platform – please manually set the __platform variable to one of the following: armv7-mali generic-x11 imx6 odroid-c1 rpi1 rpi2 rpi3 rpi3-64 x86
$
おめーどのプラットフォーム使ってるかわかんねーよ!(意訳)
ということでプラットフォームを指定して再実行。
sudo __platform=jetson-nano ~/RetroPie-Setup/retropie_setup.sh
インストールは成功したのでパッケージをインストール。
するとこんな画面に。
どうやらインストールできたらしい。
選択肢は他にないのでここで了解。
Basic installを選択するといよいよ「RETROPIE」のインストールがはじまる。
長い。
待つ。
待つ。
待つ。
とにかくひたすら待つことしかできない。
完了するまでに相当時間がかかった。(待ち飽きて放置してた)
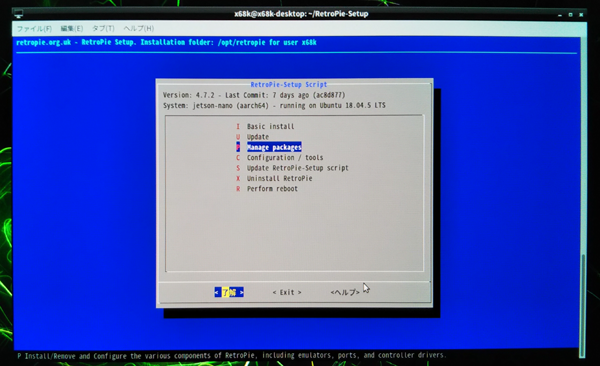
Manege packages → exp Manage experimental packages → px68k
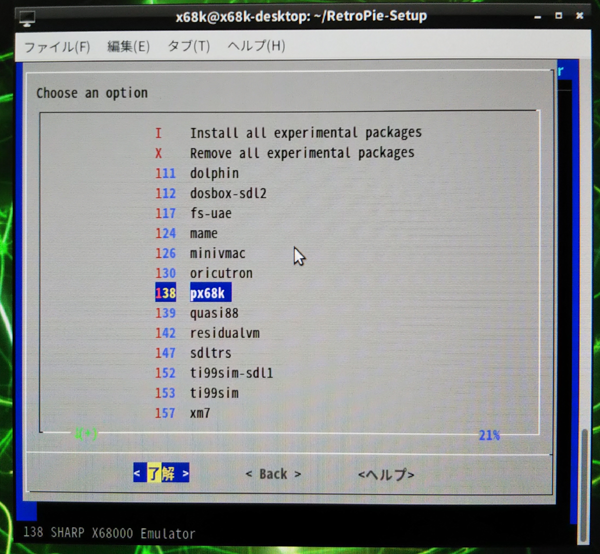
px68kをダウンロード。
また待つ。
とりあえずここまで終わったようだ。
後からBIOSなんかをセットアップするので「ubuntu」を再起動。
「RetroPie」を起動。
起動しない・・・。
エラーが出ている、もしかしてソースコードを弄らんといかんやつか?

原因を見つけるのはちょっと時間がかかりそうではある。
手順をトレースできたのでとりあえずこちらも終了。
youtubeなんかで動いている動画があるのは「RetroArch」。
ということで手順を変えてもう一度トライする。
RetroArchのセットアップリトライ
3回目なので目を瞑っててもできる。
SDカードフォーマット。
イメージを書き込み。
SDカードをセットして起動。
セットアップ。
日本語化。
OSをアップデートして最新版にしておく。
再起動。
今度はソフトウェアの設定からインストールを試みる。
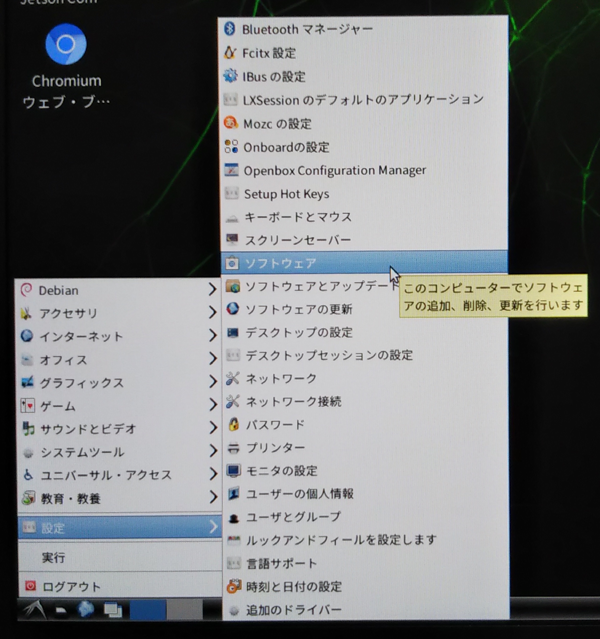
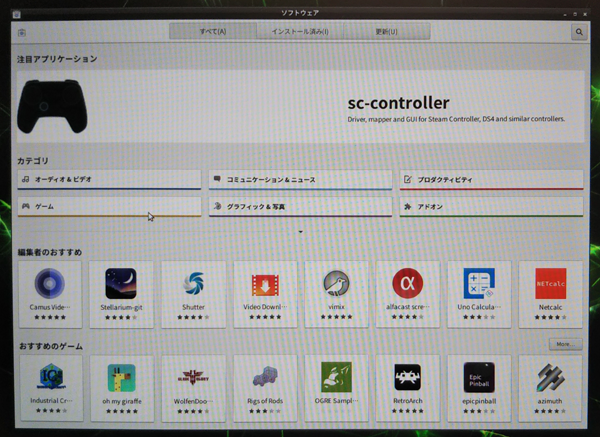
設定→ソフトウェア
カテゴリ→ゲーム
ショウ→エミュレータ
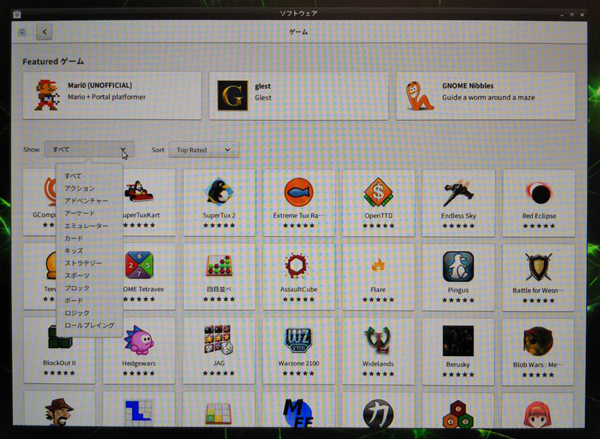
カテゴリを絞ると見つけやすい、アプリ名でサーチもできる。
「RetroArch」を見つけたら選択して
インストールする
起動すると、前回同様文字が全く表示されていないのでまたオンラインアップデートでアセットを更新。
ここまでで前回と同じ状態にまでなった。
前回オンラインでできなかったコアをダウンロードができるか確認してみるがやはりできない。
アセットはアップデートできるのにコアがダウンロードできないとは。
サーバーの設定かなにかだろうか。
F5を押して WIMP GUI を起動。
ネットワークのURLのところを見てみる。
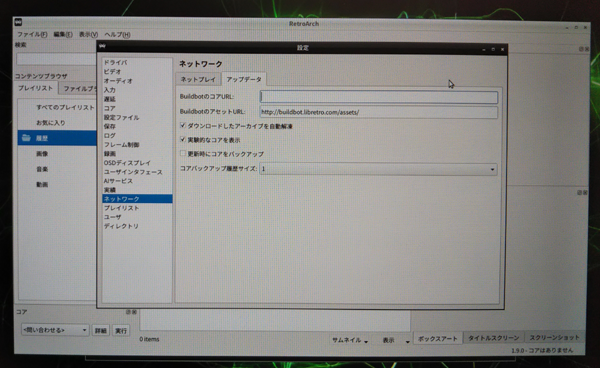
アセットのURLにはアドレスが入っているがコアのURLにはアドレスが入っていない。
これか?
とりあえずブラウザでリンク先を開いてアドレスを確認してみる。
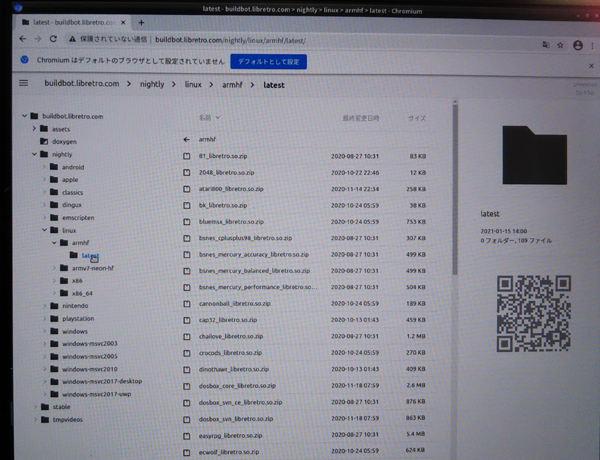
Linux系なので

を設定してみる。
コアをダウンロード。
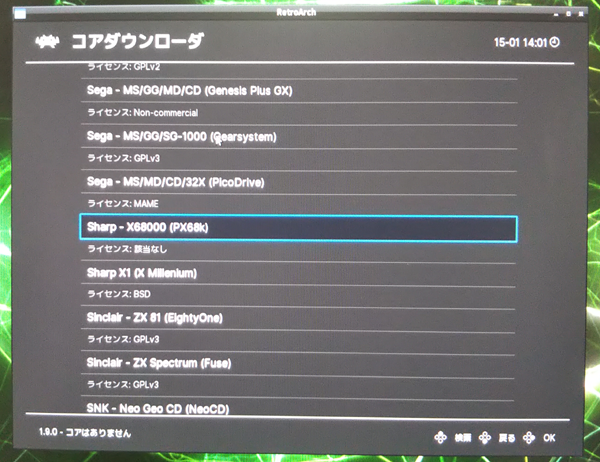
リストが出てきた。
続いてインストール。
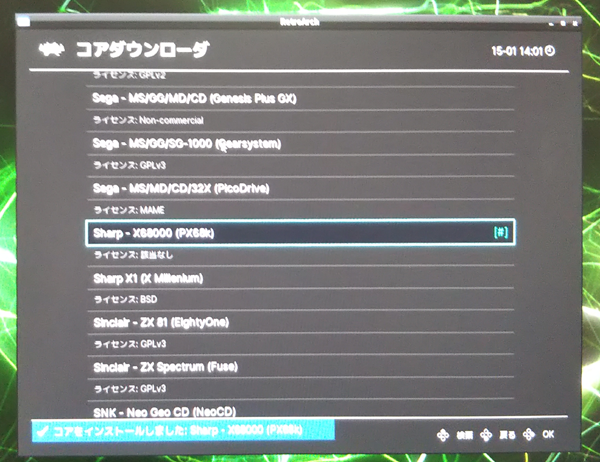
インストールもできている。
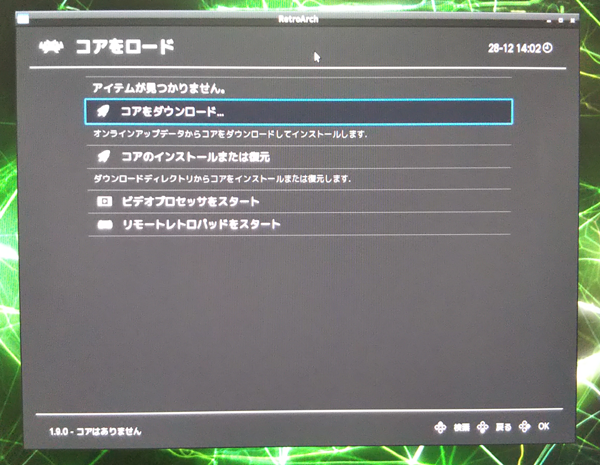
コアをロード。
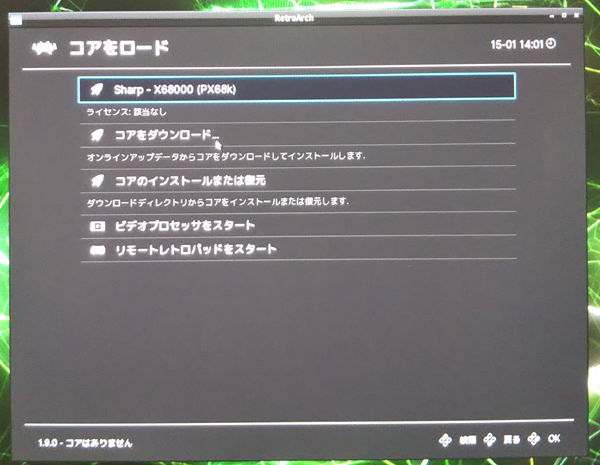
できない。
ダウンロードもできているしインストール済のリストにも出てくる。
ファイルマネージャで見ても

coresフォルダには「.info」だけでなく「.so」ファイルもある。
ロードしようとしても左下のステータスがロード済みにならない。
コアはありません。。。
コアの読み込みチェックのところではじかれているようです。
BIOSをsystem\keropiの下に入れてもダメだったのでコアに原因がある模様。
ダウンロードサーバーの場所が違うのか?
RetroArch自体は動いているので「Jetson nano」用に設定を変えなければいけないところがあるようです。
ということで。(なにが?)
肝心のX68000エミュレータpx68kはまだ動いておりません。
もう少し調べてうまく動作したらまた報告します。
続編です、無事に動かすことに成功しました。



コメント